

Project
To address the ATC conflict resolution drawbacks in present and future air traffic, the AGENT (Adaptive self-Governed aerial Ecosystem by Negotiated Traffic) project claims for a collaborative, orchestrated and proactive separation management system considering a socio-technological approach in which both human behavior and automation will play an important role.
The objective of AGENT is to provide a smooth transition from the trajectory management, separation management to collision avoidance layers throughout operational integration of seamless safety procedures in such a way that aircraft involved in a conflict together with the aircraft in the surrounding traffic behaves as a stable conflict free “ecosystem”. Furthermore, during both the trajectory and separation management phases, a highly interoperable framework to support different negotiation processes between aircraft and Air Traffic Control (ATC) will be tested in order to demonstrate the robustness of the “ecosystem” concept.
The project is motivated by some shortages in functionalities of the present Traffic alert and Collision Avoidance System (TCAS II) in dense areas. TCAS II as an autonomous airborne system has provided excellent performances in the pair-wise encounters, however induced conflicts can emerge for certain surrounding traffic scenarios. As a result, TCAS II might provoke inefficiencies in the successive resolution maneuvers which could lead to a collision and endanger a flight position of aircraft.
The AGENT concept seeks for a time horizon extension in decision making process, in order to achieve better compatibility among the safety net layers. It foresees a flight-efficient, safely collaborative and overseen separation management, fully integrated to trajectory management and collision avoidance layers within the Trajectory-Based Operations (TBO) concept.
Introduction to the AGENT project and problem statement
Approach. The current ATM system is basically a ground-based system with different levels of operational management tasks: Airspace Management; Air Traffic Flow and Capacity Management (ATFCM), which is also in charge for the Trajectory Management (TM); and finally, Separation Management (SM), developed by the ATC, in order to provide safe and smooth operations for all airspace users (Figure 1). Nowadays, the transition from the SM function to TCAS is done in a disruptive manner by means of the issuance of a TCAS Resolution Advisory (RA). As a result, crew shall suddenly stop following controller instructions and follow those provided by the on-board system. That involves important operational discontinuities and a very poor level of integration between both safety management layers, SM and CA.
AGENT is devoted to facilitate the integration between SM and CA activities, questioning the current fixed task allocation on the ground for separation management, and on the air for autonomous collision avoidance. To this end, a proactive SM management is proposed supported by multi-agent task allocation, where the “separator’s” function will be performed by the ATC, but aircraft involved in the safety issue will have an active role in the decision making process. In addition, AGENT also seeks for an enhanced integration among the TM and SM layers by means of a more efficient delivery of trajectory changes (TM) or manoeuvers (SM), for simultaneously planning the resolution of all detected conflicts and potential induced collisions for all aircraft in an efficient and agreed manner.
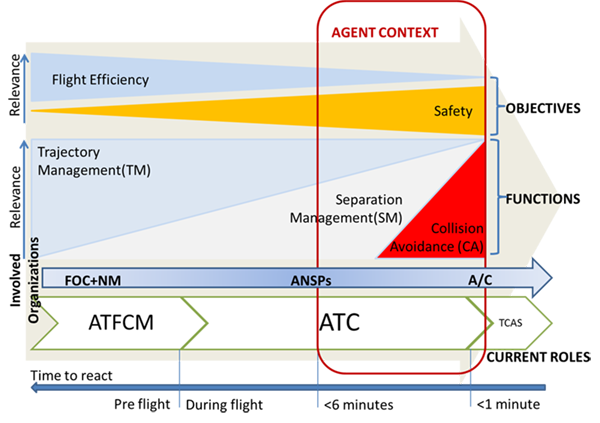
Figure 1. AGENT context within the ATM system
Methodology. In order to conduct a supervised, flight efficient and safe collaborative separation management, AGENT rely on a progressive approach for detecting and solving potential safety issues among A/Cs. To do so, AGENT introduces the Ecosystem concept. An Ecosystem is a cluster of aircraft (A/Cs) situated on the operational environment, which have spatiotemporal interdependencies (STI) and with the system itself, and could negotiate with each other and with ATC agents in order to ensure a safe and efficient conduction of their operations given a particular unit of space.
The detection of the ecosystem is conducted in a stepwise approach. First, hotspots are detected and managed, analyzing potential conflicts, or STI metrics above a certain threshold, among a group of A/Cs. Second, once hotspots have been identified, clusters are created within the hotspot if a group of A/Cs experience tighter dependencies.
The cluster monitoring will lead to the creation of an Ecosystem if the following conditions are met:
1 – There is a cluster of A/Cs for which there is forecasted a conflict and / or a spatiotemporal interdependency above a certain threshold;
2 – The cluster of A/Cs are properly equipped with AGENT-capable systems.
3 – The cluster of A/Cs accept to be part of the AGENT decision-making process for the resolution of the potential safety event;
The Ecosystem tracking and resolution (Figure 2) is performed collaboratively by the ATC and involved aircraft. ATC ground tools conduct the synchronization and updating of trajectories, the evaluation of the ecosystem state and will generate potential resolution trajectories by exhaustive analysis of the state space for all ecosystem members as well. On the other hand, aircraft will negotiate to find a commonly agreed conflict-free solution for all members while the ATC will monitor the negotiation evolution to be ready for a potential deadlock. In case the negotiation reaches the deadlock state or the evolution of the members is compromising the safety of the operations, ATC will impose a safe solution for all aircraft (Figure 3).
Finally, the negotiation process among aircraft and ATC seeks for a globally efficient solution for all agents. For airborne agents, and based on different business models, the most predominant metrics will be the fuel consumption and the time-cost efficiency. For the ATC, safety and compliance with RBTs for the airspace users are the main elements to be considered, to impact neither on the safety of the local operations nor predictability of the system.

Figure 2. Ecosystem Tracking and Resolution
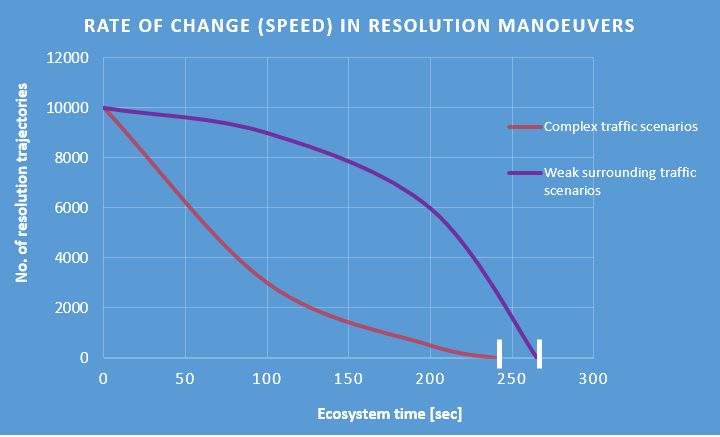
Figure 3. Rate of change in resolution manoeuvers until deadlock